Скачать с ютуб CNN-SLAM - Real-Time Dense Monocular SLAM With Learned Depth Prediction | Spotlight 4-2B в хорошем качестве
CNN-SLAM - Real-Time Dense Monocular SLAM With Learned Depth Prediction | Spotlight 4-2B
7 лет назад
Из-за периодической блокировки нашего сайта РКН сервисами, просим воспользоваться резервным адресом:
Загрузить через ClipSave.ruСкачать бесплатно CNN-SLAM - Real-Time Dense Monocular SLAM With Learned Depth Prediction | Spotlight 4-2B в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно CNN-SLAM - Real-Time Dense Monocular SLAM With Learned Depth Prediction | Spotlight 4-2B или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон CNN-SLAM - Real-Time Dense Monocular SLAM With Learned Depth Prediction | Spotlight 4-2B в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
CNN-SLAM - Real-Time Dense Monocular SLAM With Learned Depth Prediction | Spotlight 4-2B
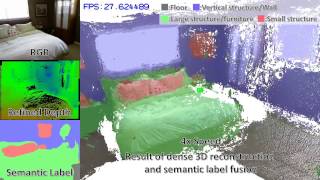
Keisuke Tateno; Federico Tombari; Iro Laina; Nassir Navab Given the recent advances in depth prediction from Convolutional Neural Networks (CNNs), this paper investigates how predicted depth maps from a deep neural network can be deployed for the goal of accurate and dense monocular reconstruction. We propose a method where CNN-predicted dense depth maps are naturally fused together with depth measurements obtained from direct monocular SLAM, based on a scheme that privileges depth prediction in image locations where monocular SLAM approaches tend to fail, e.g. along low-textured regions, and vice-versa. We demonstrate the use of depth prediction to estimate the absolute scale of the reconstruction, hence overcoming one of the major limitations of monocular SLAM. Finally, we propose a framework to efficiently fuse semantic labels, obtained from a single frame, with dense SLAM, so to yield semantically coherent scene reconstruction from a single view. Evaluation results on two benchmark datasets show the robustness and accuracy of our approach.
Comments