Скачать с ютуб Nonlinear MPC for Quadrupedal Locomotion Using Second-Order Sensitivity Analysis - Presentation в хорошем качестве
Nonlinear MPC for Quadrupedal Locomotion Using Second-Order Sensitivity Analysis - Presentation
1 год назад
Скачать бесплатно Nonlinear MPC for Quadrupedal Locomotion Using Second-Order Sensitivity Analysis - Presentation в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Nonlinear MPC for Quadrupedal Locomotion Using Second-Order Sensitivity Analysis - Presentation или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Nonlinear MPC for Quadrupedal Locomotion Using Second-Order Sensitivity Analysis - Presentation в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Nonlinear MPC for Quadrupedal Locomotion Using Second-Order Sensitivity Analysis - Presentation
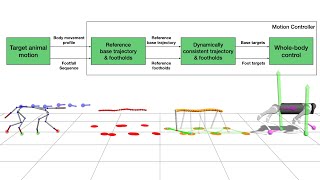
Presentation for the workshop paper "Nonlinear Model Predictive Control for Quadrupedal LocomotionUsing Second-Order Sensitivity Analysis" by Dongho Kang, Flavio De Vincenti, and Stelian Coros. ICRA 2022: 6th Full-Day Workshop on Legged Robots https://leggedrobots.org Abstract: We present a versatile nonlinear model predictive control (NMPC) approach for quadrupedal locomotion. Our formulation can jointly optimize a base trajectory and a set of stepping locations over a finite time horizon based on simplified dynamics models. We leverage second-order sensitivity analysis and a sparse Gauss-Newton (SGN) method to solve the resulting optimal control problems. We further document our ongoing effort to verify our approach through simulation and hardware experiments. Finally, we extend our locomotion framework to deal with challenging tasks that comprise gap crossing, movement on stepping stones, and multi-robot control. Acknowledgment: This work has received funding from the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation programme. Project website: https://donghok.me/nmpc-for-quad-loco Computational Robotics Lab: - http://crl.ethz.ch - / computationalr2 Dongho Kang: - https://donghok.me/ - / donghokang - / eastskykang Stelian Coros: - http://crl.ethz.ch/coros.html
Comments




![Claudio Semini: Quadruped robots for Heavy-Duty Operations [ICRA 2020 WS - Legged Robots]](https://i.ytimg.com/vi/QJQ_K4B6f4I/mqdefault.jpg)