Скачать с ютуб Animal Gaits on Quadrupedal Robots Using Motion Matching and Model Based Control - IROS 2021 Talk в хорошем качестве
Animal Gaits on Quadrupedal Robots Using Motion Matching and Model Based Control - IROS 2021 Talk
2 года назад
Скачать бесплатно Animal Gaits on Quadrupedal Robots Using Motion Matching and Model Based Control - IROS 2021 Talk в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Animal Gaits on Quadrupedal Robots Using Motion Matching and Model Based Control - IROS 2021 Talk или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Animal Gaits on Quadrupedal Robots Using Motion Matching and Model Based Control - IROS 2021 Talk в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Animal Gaits on Quadrupedal Robots Using Motion Matching and Model Based Control - IROS 2021 Talk
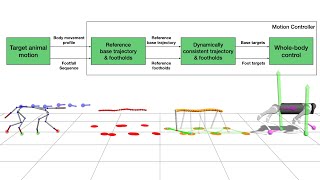
Presentation for the IROS 2021 paper "Animal Gaits on Quadrupedal Robots Using Motion Matching and Model-Based Control" by Dongho Kang, Simon Zimmermann, and Stelian Coros. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021) Abstract: In this paper, we explore the challenge of generating animal-like walking motions for legged robots. To this end, we propose a versatile and robust control pipeline that combines a state-of-the-art model-based controller with a data-driven technique that is commonly used in computer animation. We demonstrate the efficacy of our control framework on a variety of quadrupedal robots in simulation. We show, in particular, that our approach can automatically reproduce key characteristics of animal motions, including speed-specific gaits, unscripted footfall patterns for nonperiodic motions, and natural small variations in overall body movements. Acknowledgment: This work has received funding from the European Research Council (ERC) under the European Union's Horizon 2020 research and innovation programme. Project website: https://donghok.me/animal-gaits-on-qu... Computational Robotics Lab: - http://crl.ethz.ch/coros.html - / computationalr2 Dongho Kang - https://donghok.me/ - / donghokang - / eastskykang Simon Zimmermann - https://n.ethz.ch/~simonzi/ Stelian Coros - http://crl.ethz.ch/coros.html
Comments