Скачать с ютуб Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - Supplementary в хорошем качестве
Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - Supplementary
1 год назад
Скачать бесплатно Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - Supplementary в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - Supplementary или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - Supplementary в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - Supplementary
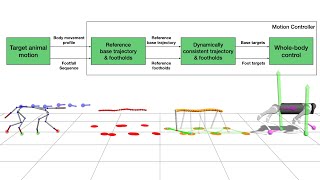
Supplementary video for the IROS 2022 paper "Animal Motions on Legged Robots Using Nonlinear Model Predictive Control" by Dongho Kang, Flavio De Vincenti, Naomi C. Adam, and Stelian Coros. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022): https://iros2022.org/ Abstract: This work presents a motion capture-driven locomotion controller for quadrupedal robots that replicates the non-periodic footsteps and subtle body movement of animal motions. We adopt a nonlinear model predictive control (NMPC) formulation that generates optimal base trajectories and stepping locations. By optimizing both footholds and base trajectories, our controller effectively tracks retargeted animal motions with natural body movements and highly irregular strides. We demonstrate our approach with prerecorded animal motion capture data. In simulation and hardware experiments, our motion controller enables quadrupedal robots to robustly reproduce fundamental characteristics of a target animal motion regardless of the significant morphological disparity. Project website: https://donghok.me/animal-motions-on-... Computational Robotics Lab: - http://crl.ethz.ch - / computationalr2 Dongho Kang: - https://donghok.me/ - / donghokang - / eastskykang Stelian Coros: - http://crl.ethz.ch/coros.html
Comments